Dr. Békési Bertold
egyetemi docens
ZMNE BJKMK RLI Fedélzeti Rendszerek Tanszék
bekesi.bertold@uni-nke.hu
ZÁRT VÍZSZINTES ALAPÚ INERCIÁLIS NAVIGÁCIÓS RENDSZEREK
Jelen cikk a Repüléstudományi Konferencia 2009 Szolnok 50 év hangsebesség felett a Magyar légtérben megjelent „Nyitott vízszintes alapú inerciális navigációs rendszerek” [1] egyenleteit és ábráit felhasználva a zárt vízszintes alapú inerciális navigációs rendszereket mutatja be.
A nyitott inerciális navigációs rendszerekben, amelyek a vízszintes koordináta-rendszerben működnek (az alap, amelyen az axelerométerek voltak), a vízszintes síkban stabilizálódott a rajta elhelyezett axelerométerek mutatásainak használata nélkül, valamilyen fedélzeti függőlegesek segítségével. Ehhez, mint azt láttuk a  vektor figyelembe vétele vezetett .
vektor figyelembe vétele vezetett .
A zárt inerciális navigációs rendszerben, amelyek a vízszintes koordináta rendszerben működnek, amikor a  vektorról semmiféle információ a különféle fedélzeti műszerekről nem feltételeződik, a
vektorról semmiféle információ a különféle fedélzeti műszerekről nem feltételeződik, a  vektor kompenzálása a vízszintes síkban az alap stabilizálásával, az axelerométerek mutatásának segítségével történik, amelyek magán az alapon vannak elhelyezve.
vektor kompenzálása a vízszintes síkban az alap stabilizálásával, az axelerométerek mutatásának segítségével történik, amelyek magán az alapon vannak elhelyezve.
Lehetséges-e ilyen stabilizáció? Megmutatjuk, hogy lehetséges. Először megmagyarázzuk az ilyen stabilizáció lényegét a zárt inerciális navigációs rendszerek példáján, amely vízszintesen azimutálisan szabad koordináta-rendszerben működik.
Legyen az azimutálisan szabad alap a kezdeti időpillanatban vízszintes. Továbbá az objektum mozogjon  és
és  sebességgel az
sebességgel az  és
és  tengelyek mentén. (1. ábra)
tengelyek mentén. (1. ábra)
1. ábra.
Ha valamilyen úton módon az alapot elfordítjuk az x tengely körül
 (1)
(1)
szögsebességgel és az y tengely körül
 (2)
(2)
szögsebességgel, akkor az alap továbbra is vízszintes marad (1. ábra)
A szükséges szögsebesség értékek kiszámítása az alap elfordulásával (1), (2) egyenletekből a  és
és  jelekkel egyetértve, amelyeket az axelerométerek
jelekkel egyetértve, amelyeket az axelerométerek  és
és  mutatásának integrálásával a
mutatásának integrálásával a  és
és  kezdeti feltételek alapján lehet meghatározni.
kezdeti feltételek alapján lehet meghatározni.
A gyakorlatban hogyan lehetséges az alap elfordulását a kiszámított szögsebességekből  és
és  megvalósítani?
megvalósítani?
Nagyon egyszerű, ilyen elfordulásokat kétszabadságfokú pörgettyű segítségével lehet megvalósítani, amelyek az alapon úgy vannak elhelyezve, mint ahogyan azt a 2. ábrán láthatjuk.
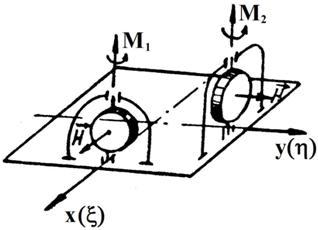
2. ábra.
Ha a pörgettyű körül  és
és  nyomatékkal hatunk, amely a repülőgépen háromszabadságfokú kardánfelfüggesztésben van elhelyezve, részt vesz a pörgettyű precessziós mozgásában
nyomatékkal hatunk, amely a repülőgépen háromszabadságfokú kardánfelfüggesztésben van elhelyezve, részt vesz a pörgettyű precessziós mozgásában
 (3)
(3)
 (4)
(4)
szögsebességgel.
Ha  -t az ismert
-t az ismert  és
és  alapján hozzuk létre, akkor
alapján hozzuk létre, akkor
 (5)
(5)
 (6)
(6)
és a k arányossági tényezőt a  feltételből határozzuk meg:
feltételből határozzuk meg:
 (7)
(7)
akkor a (3) - (7) egyenletekből kapjuk, hogy az alap szögelfordulásának forgása:
 ;
;  (8)
(8)
összehasonlítva a (1) és (2) egyenleteket a (8) egyenlettel azt kapjuk, hogy az ilyen alap mindig vízszintes marad. A (7) kifejezést Schuler-feltételnek nevezzük.
Tehát a következő eredményt kaptuk: Legyen egy pörgettyűs alap, amely a 2. ábrán látható. Ha elhelyezünk rajta két axelerométert és a giroszkópok tengelyeire nyomatékot rakunk, amely az integrállal arányos és az axelerométerek mutatásától a sebesség kezdeti feltételeinek figyelembe vételével, akkor abban az esetben, ha az arányossági tényező eleget tesz a Schuler feltételnek, az alap, amely a kezdeti időpillanatban vízszintes helyzetben van, vízszintes is marad a repülőgép maradék mozgása során.
Ebben az esetben a vízszintesen azimutálisan szabad alapon elhelyezett axelerométerek jelzései a  egyenlet alapján:
egyenlet alapján:
 (9)
(9)
3. ábra
Nyitott vízszintes alapú azimutálisan szabad inerciális navigációs rendszerhatásvázlata [3]
[Szerk.: Dr. Békési Bertold – MS Word]
Ha ezeket a jeleket bevezetjük a 3. ábrán látható számító egységbe, akkor meghatározható a repülőgép sebessége és a földrajzi koordinátái. Az ilyen inerciális rendszer egyértelműen zárt lesz.
Mi is tehát a különbség a nyitott vízszintesen azimutálisan szabad inerciális navigációs rendszertől? Az eltérés a következő:
- az alap vízszintesben tartásához külső jelzést használ fel (nyitott inerciális navigációs rendszer);
- az axelerométerek jelzéseit használja fel a vízszintesben tartásra (zárt inerciális navigációs rendszer).
Tárgyaljuk meg a kapott eredményt:
Először a giroinerciális alap vízszintes marad az objektum bármilyen pályájú mozgása során. Ilyen esetben azt mondják, hogy a giroinerciális alap ballisztikusan stabilis. Ez a sajátossága a giroinerciális alapnak. Elemezhetjük mint előnyét, összehasonlítva a műhorizontokkal és a pörgettyűs mesterséges műfüggőlegesekkel, sugárirányú helyesbítéssel, amelyek az objektum manőverezése során igen nagy hibával rendelkeznek.
Másodsorban, a zárt giroinerciális navigációs koordináta rendszer folyamatosan méri és számítja az objektum olyan fontos mozgási paramétereit, mint a gyorsulás, a sebesség és a koordináták. Mindezek a mérések teljesen autonóm módon mennek végbe, vagyis nem igényelnek semmilyen földi berendezést, amelyek ezt a munkát biztosítanák. Innen származik a zárt inerciális navigációs rendszer teljes zavarvédelme.
Ha a zárt inerciális navigációs rendszer működési elvének vizsgálatakor a figyelmünket mi csak a giroinerciális rendszerek olyan mozgására fordítottuk, amikor a kezdeti időpillanatban az alap vízszintes volt és minden kezdeti feltétel abszolút helyesen volt bevezetve, tehát csak a rendszer zavarvédett mozgása volt megvizsgálva.
Felmerül a kérdés, hogyan fog mozogni a rendszer, ha a kezdeti időpillanatban az alap nem volt vízszintes és a kezdeti feltételek hibával voltak bevezetve? Tehát felmerül a stabilitás működésének kérdése is a zárt giroinerciális navigációs rendszerekben.
Ezenkívül nagyon fontos megvizsgálni a giroinerciális rendszerek hibáit, amelyek az elemek szerkezeti hibájából lépnek fel:
- a pörgettyűk eltávozása az alaptól;
- az integrátorok hibái.
És végezetül megemlíteném, hogy mi csak a zárt vízszintesen azimutálisan szabad giroinerciális navigációs rendszert vizsgáltuk.
Fontos megvizsgálni a zárt giroinerciális navigációs rendszereket más típusú alapokkal is. Ezenkívül lehetséges olyan zárt inerciális navigációs rendszer, amikor az axelerométerekkel, szögsebességekkel (1), (2) egyenletek az alap elfordulásának szükségessége nem a giroszkópok segítségével történik, hanem a teleszkópos berendezések segítségével, amelyek a csillagokra vannak irányítva. Az ilyen zárt inerciális navigációs rendszereket asztroinerciális rendszereknek nevezzük.
Mindezen kérdésekre majd később válaszolunk. Ezen cikk befejezésekor bemutatom a zárt inerciális rendszert azimutálisan szabad alappal (4. ábra).
Az alap kardánfelfüggesztésben van elhelyezve. Ennek következtében a kardánfelfüggesztés külső keretének tengelye egybeesik a repülőgép hosszirányú tengelyével, a belső keret tengelye vízszintes és az alap tengelye függőleges. A kardánfelfüggesztés tengelyének csak ilyen elhelyezése teszi lehetővé a repülőgép bedöntési  , bólintási
, bólintási  és irányszög
és irányszög  kardánhibák nélküli mérését.
kardánhibák nélküli mérését.
A bedöntési, bólintási és irányszögek a 4. ábrán 13, 14, és 15 jelölik. Megjegyezzük, hogy az ilyen alapot nem lehet elhelyezni a repülőgépen korlátlan manőverező képességgel. Ahhoz, hogy elhelyezhessük az alapot a repülőgépen, a külső keretet egy követő keretbe kell elhelyezni, amelynek tengelye egybe kell, hogy essen a repülőgép hossztengelyével. A  (13),
(13),  (14) és
(14) és  (15) adók a kardánfelfüggesztés tengelyein vannak elhelyezve.
(15) adók a kardánfelfüggesztés tengelyein vannak elhelyezve.
Az alapon elhelyezett (1 és 5) pörgettyűk az alapot a vízszintes síkban tartják meg és a (16) iránypörgettyű az alap azimutális helyzetét vezérli. Ha az iránypörgettyű nem kerül helyesbítésre, akkor azimutálisan szabad lesz és az alap szintén azimutálisan szabad lesz. A (3, 7) axelerométerek jelzései a (4, 8) integráló berendezések integrálása után az (1, 5) pörgettyűk (2, 6) nyomatékmotorjaira kerülnek. A csatorna erősítési tényezőjét az axelerométertől a pörgettyű nyomatékmotorjáig a Schuler feltételből állapítjuk meg.
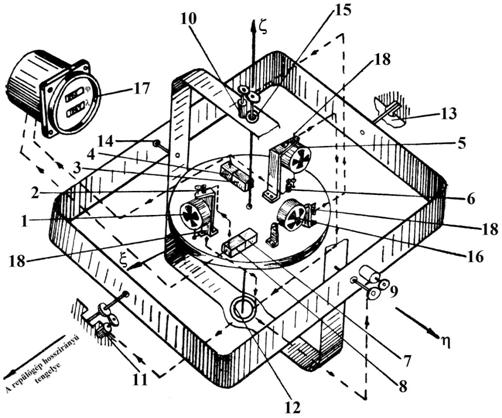
4. ábra
Zárt inerciális rendszer azimutálisan szabad alappal [3]
Az alap valamennyi tengelye mentén (3 tengely) tehermentesítve van. A tehermentesítő rendszer részei:
- 3 db szöghelyzetadó (18);
- sinus-cosinus koordináta átalakító (12);
- végrehajtó tehermentesítő motorok (9, 10, 11);
- az integrátorok jelzései, amelyek a sebesség értékével egyenlőek
 a (17) megoldó egységbe kerülnek, amely a 3.ábrán látható;
a (17) megoldó egységbe kerülnek, amely a 3.ábrán látható;
- a megoldó egység a repülőgép földrajzi koordinátáinak
 és
és  kiszámítását végzi.
kiszámítását végzi.
Még egyszer összefoglalva:
- a giroinerciális alap kiváló girofüggőleges, amely nem rendelkezik ballisztikus deviációval (bármilyen mozgáspályán vízszintes marad);
- teljesen autonóm, vagyis nem igényel földi eszközöket, amelyek biztosítanák a munkát. Ebből következik a zárt inerciális navigációs rendszer teljes zavarvédettsége.
A vizsgált rendszer előnyei:
- kiválóan alkalmas a
 kardánhibák nélküli szögmeghatározásra;
kardánhibák nélküli szögmeghatározásra;
- a giroinerciális rendszer lehetővé teszi majdnem minden fedélzeti-navigációs paraméter mérését: bedöntés, bólintás, irányszög, útsebesség és a koordinátákat.
A vizsgált rendszer hátránya:
- az objektum koordinátáinak mérési hibái az inerciális rendszer működési idejének függvényében növekednek.
1 Repüléstudományi Konferencia 2009 Szolnok 50 év hangsebesség felett a Magyar légtérben megjelent „Nyitott vízszintes alapú inerciális navigációs rendszerek” cikk alapján.
2 Repüléstudományi Konferencia 2009 Szolnok 50 év hangsebesség felett a Magyar légtérben megjelent „Nyitott vízszintes alapú inerciális navigációs rendszerek” cikk 2. ábrája alapján.
3 A repüléstudományi Közlemények 2008/3 számában megjelent Inerciális navigációs rendszerek II. cikkben részletesen elemezve.
Felhasznált irodalom
[1] Dr. Békési Bertold: Inerciális navigációs rendszerek II. Repüléstudományi Közlemények online folyóirat, Szolnok, 2008/3 szám. HU ISSN 1789-770X
[2] Dr. Békési B. — Dr. Szegedi P. Nyitott vízszintes alapú inerciális navigációs rendszerek. Repüléstudományi Közlemények különszám, Szolnok, 2009. április 24.
[3] В. А. Вериго, Ф. С. Гергель: Пилотажно-навигационные приборы и измерительные системы. Ленинградская Краснознаменная военно-воздушная инженерная академия имени А. Ф. Можайского, Ленинград, 1959.